
About me
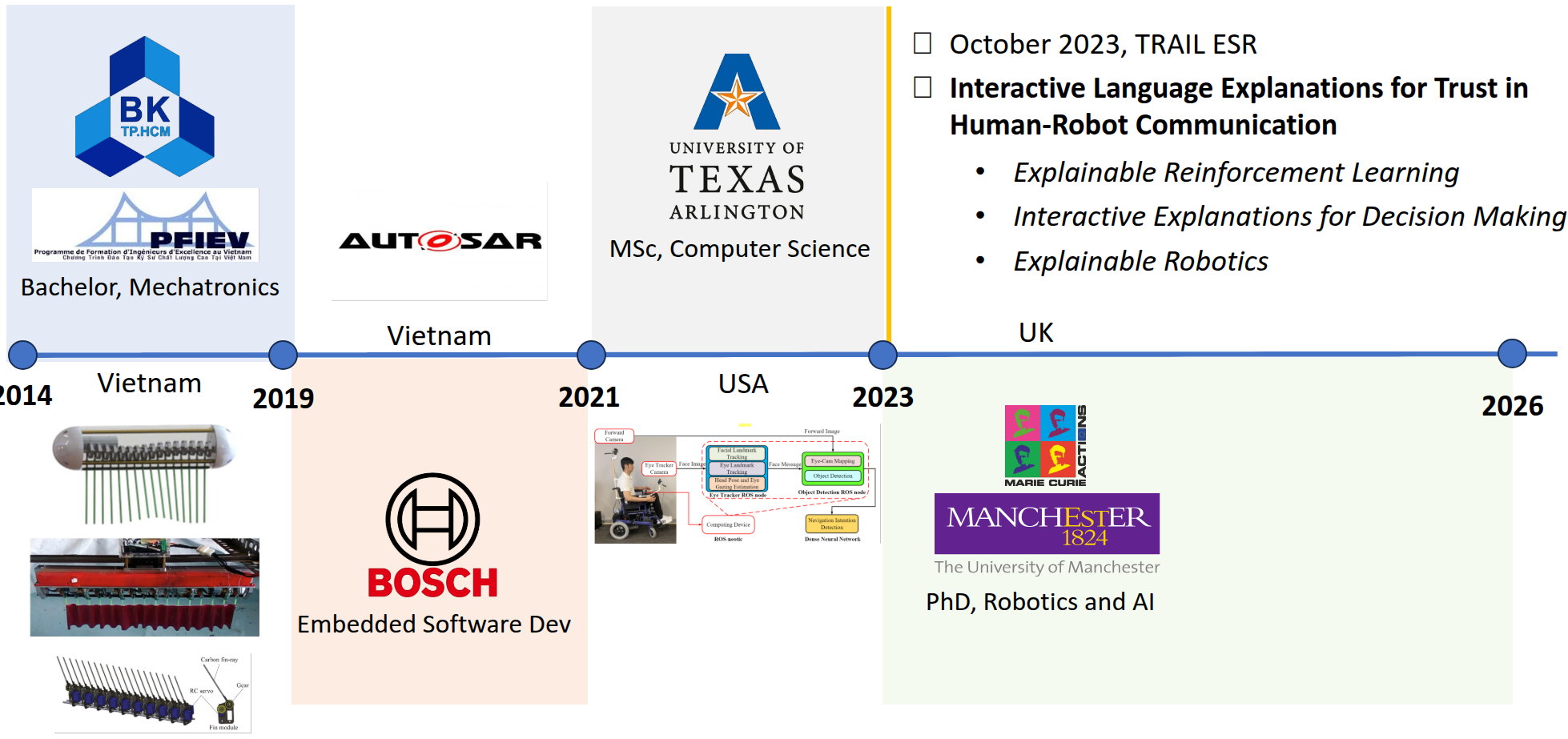
My name is Tien Pham, a Marie-Curie Early Career Researcher and a PhD student at The University of Manchester, UK. My reserach interests are Explainable Artificial Intelligence, Vision-Language Models and Cognitive Robotics. Specifically, My research develops transparent, interpretable, and generalizable learning systems for autonomous robots, addressing fundamental challenges in trust, safety, and human–AI interaction. I got my Master from The University of Texas at Arlington, USA and Bachelor in Ho Chi Minh City University of Technology (Bach Khoa), Vietnam
I am actively involved in various academic and industrial activities within the Marie Curie Doctoral Network, including an academic secondment at LAAS-CNRS (Toulouse, France) and an industrial secondment at PAL Robotics (Barcelona, Spain). I also serve as a reviewer for several international conferences, including International Joint Conference on Neural Networks (IJCNN), IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE International Conference on Development and Learning (ICDL), and IEEE International Conference on Robot and Human Interactive Communication (RO-MAN). Additionally, I am the organizer of the TRAIL Conference.
Snapshot
Education
"Live as if you were to die tomorrow. Learn as if you were to live forever" - Mahatma Gandhi
Thesis: Interactive Language Explanation and Visualization for Explainable Robotics Supervisor: Angelo Cangelosi, PhD
Research Interest: Explainable Deep Reinforcement Learning, VLMs, Robotics.
Thesis: Context-aware interface for semi-autonomous smart wheelchair Supervisor: Malfred Huber, PhD
Courseworks: Cloud Computing, Data Mining, Computer Architecture, Data Analysis & Modeling Techniques, Design and Analysis Algorithms, Distributed Systems, and Machine Learning.
Thesis: Design of Udulating Fin Applying for Autonomous Underwater Vehicle (Highest score: 9.54/10). Supervisor: Tan-Tien Nguyen, PhD
Project
When you really want something, all the universe conspire in helping you to achieve it - Paulo Coelho.
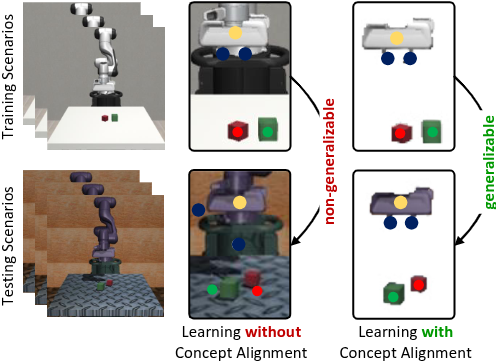
CGGT: Concept-Guided Grounded Training for Generalizable and Interpretable Reinforcement Learning in Robot Control
Under Review
Paper || Github (comming soon)
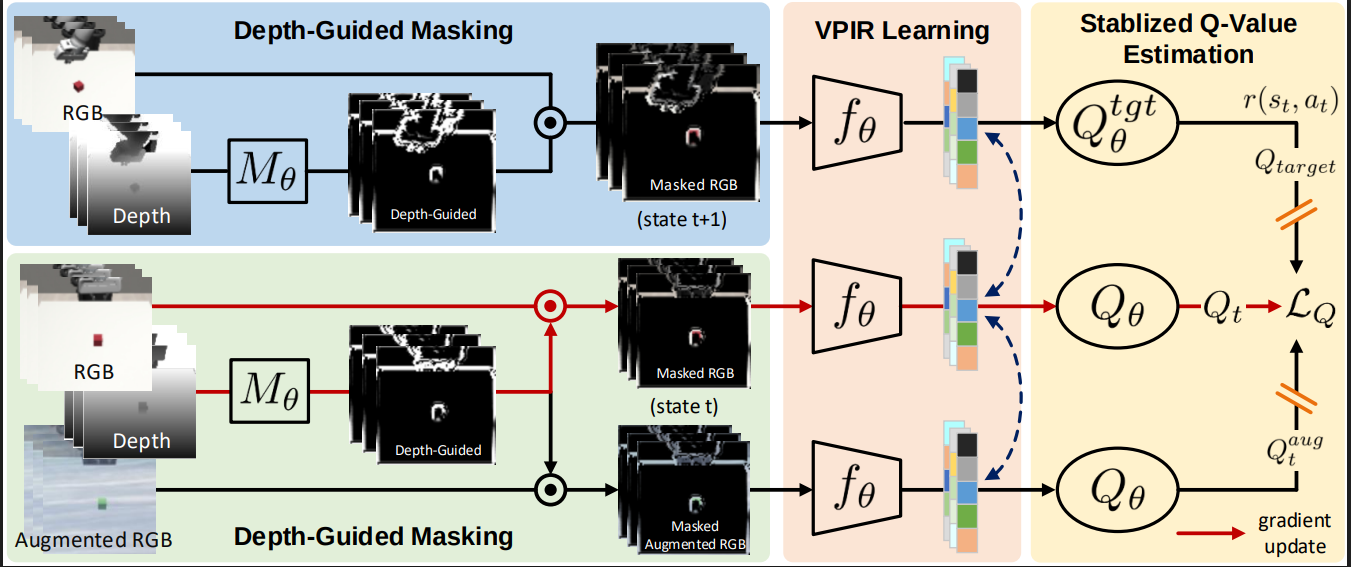
DeGuV: Depth-Guided Visual Reinforcement Learning for Generalization and Interpretability in Manipulation
Under Review
Paper || Github || Demo Video
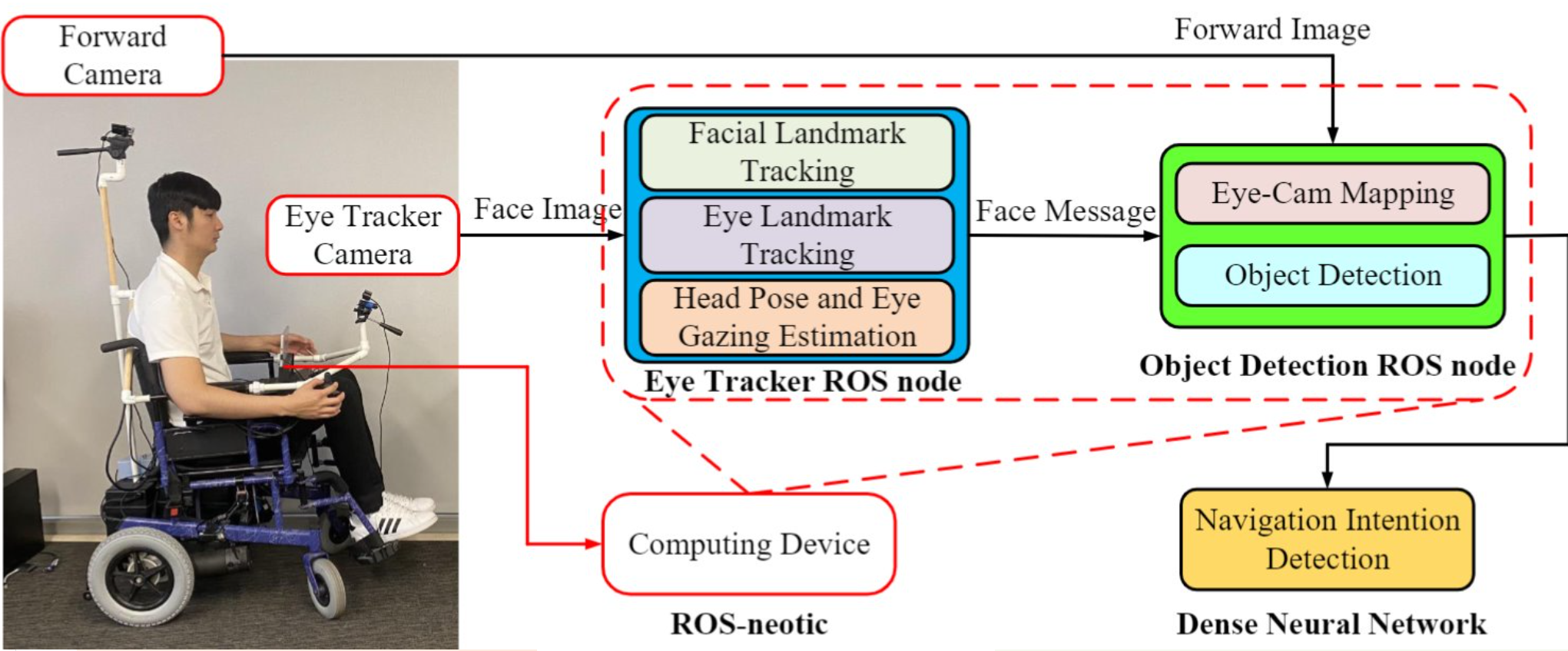
Master Thesis: Context-aware interface for semi-autonomous smart wheelchair
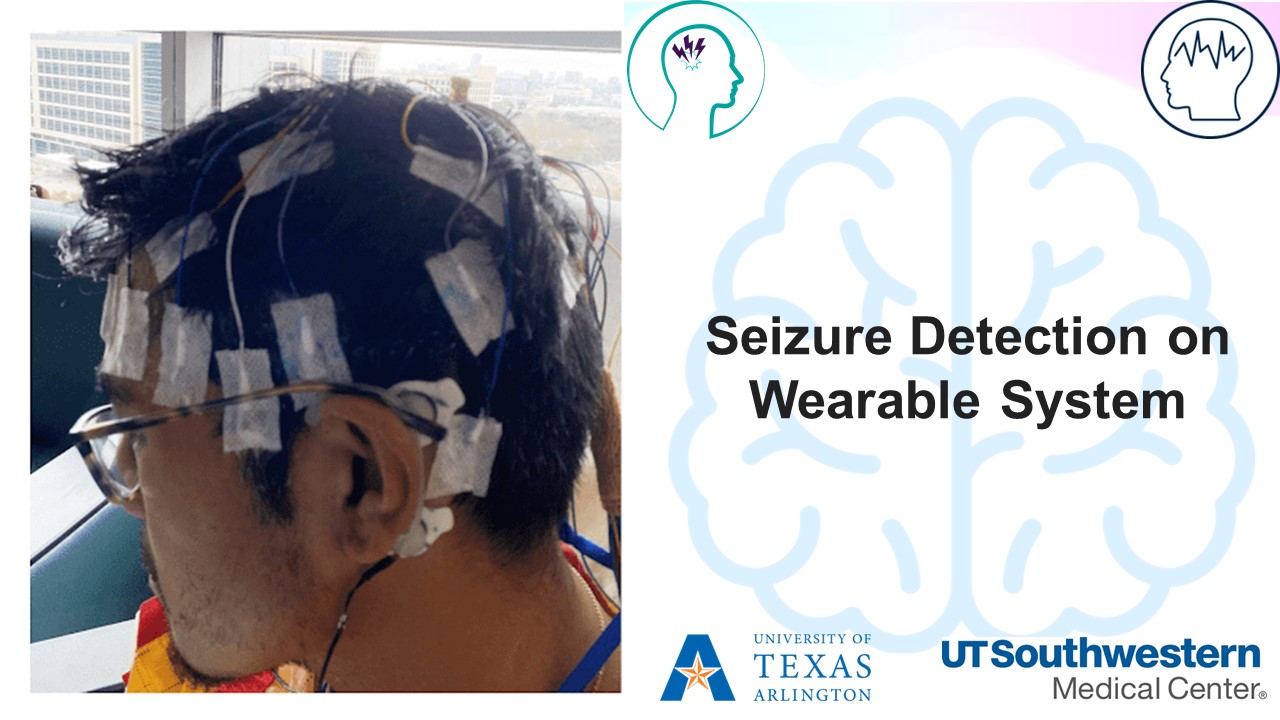
Real-Time Seizure Detection Using Behind-The-Ear Wearable System
American Epilepsy Society (AES) 2022 Abstract
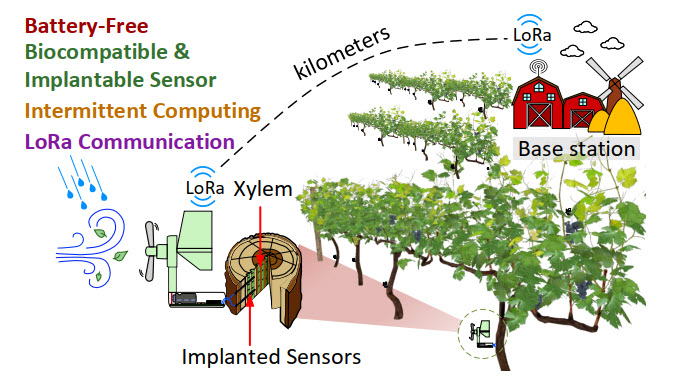
IoTree: A Battery-free Wearable System with Biocompatible Sensors for Continuous Tree Health Monitoring
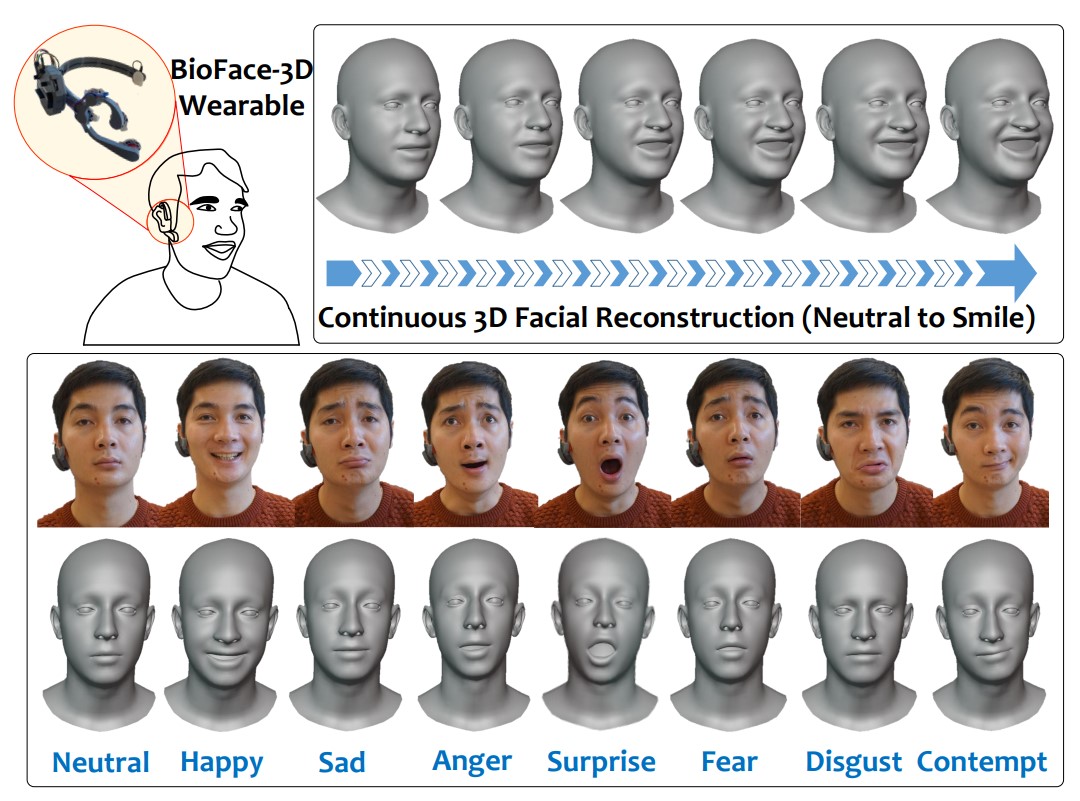
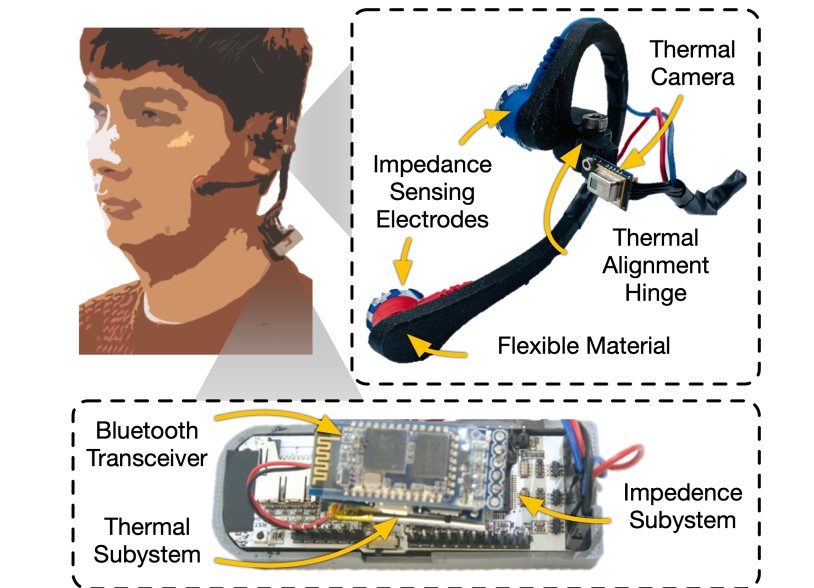
BioFace-3D: Continuous 3D Facial Reconstruction Through Lightweight Single-ear Biosensors

I am honour to attend and present my work at IJCNN 2025 in Rome, Italy

"Remember that happiness is a way of travel, not a destination" - Roy Goodman.

"Everything negative pressure, challenges - is an opportunity for me to rise" - Kobe Bryant

"The biggest dreams aren't fueled by belief. They are fueled by doubt" - Kobe Bryant
Publications
Conference Proceedings
- Khang Nguyen, An T Le, Tien Pham, Manfred Huber, Jan Peters, Minh Nhat Vu (2025). FlowMP: Learning Motion Fields for Robot Planning with Conditional Flow Matching in Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025).
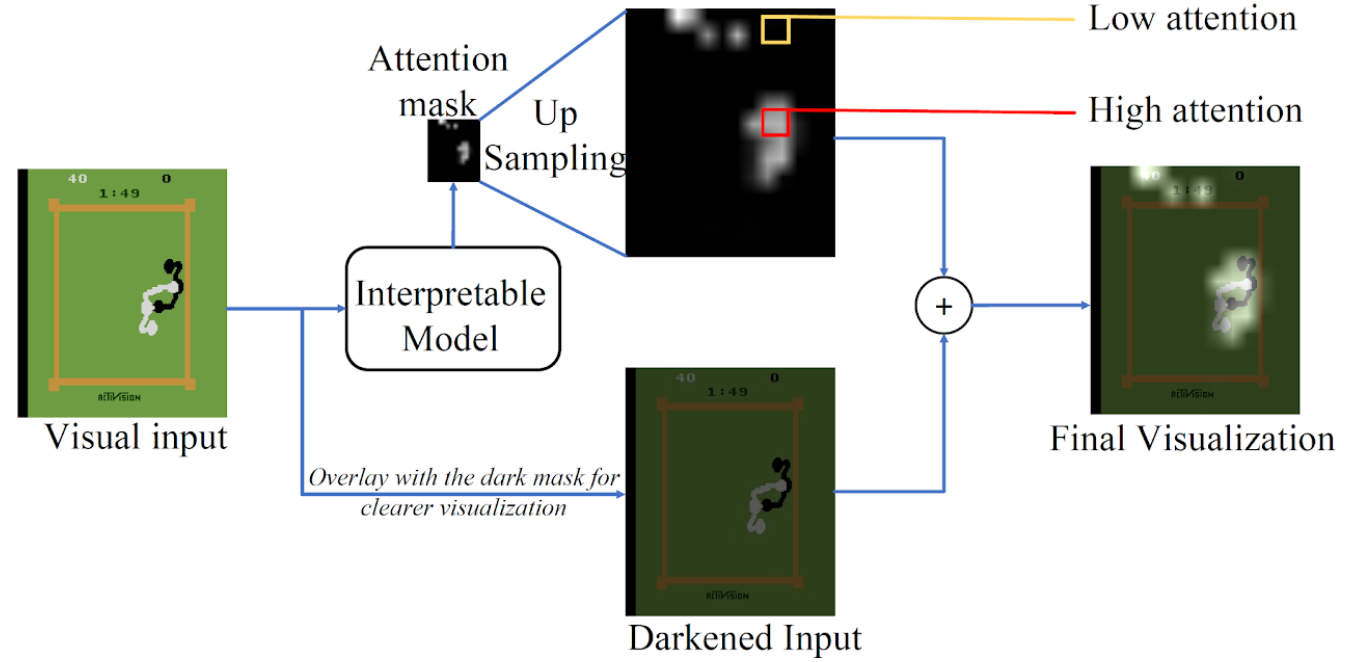
- Tien Pham, Angelo Cangelosi (2025). Pay Attention to What and Where? Interpretable Feature Extractor in Vision-based Deep Reinforcement Learning in Proceedings of The 38th International Joint Conference on Neural Networks (IJCNN 2025)
- Tuan Dang, Trung Tran, Khang Nguyen, Tien Pham, Nhat Pham, Tam Vu, and Phuc Nguyen (2022). IoTree: A Battery-free Wearable System with Biocompatible Sensors for Continuous Tree Health Monitoring. Proceedings of the 28th Annual International Conference on Mobile Computing and Networking. (Accepted)
- Vimal Kakaraparthi, Qijia Shao, Charles Carver, Tien Pham, Nam Bui, Phuc Nguyen, Xia Zhou, and Tam Vu (2021). FaceSense: Sensing Face Touch with An Ear-worn System. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies (pp. 1-27).
- Yi Wu, Vimal Kakaraparthi, Zhang Li, Tien Pham, Jian Liu, Phuc Nguyen (2021). BioFace-3D: Continuous 3D Facial Reconstruction through Lightweight Single-Ear Biosensors. Proceedings of the 27th Annual International Conference on Mobile Computing and Networking (pp. 350-363).
- Van Hien Nguyen, Canh An Tien Pham, Van Dong Nguyen, Tan Tien Nguyen (2019). Study on Velocity Control of Gymnotiform Undulating Fin Module. The International Conference on Advanced Engineering Theory and Applications. Springer, Charm (pp. 714-725).
- Van Hien Nguyen, Canh An Tien Pham, Van Dong Nguyen, Hoang Long Phan, Tan Tien Nguyen (2018). Computational Study on Upward Force Generation of Gymnotiform Undulating Fin. The International Conference on Advanced Engineering Theory and Applications. Springer, Charm (pp. 914-923).
- Van Dong Nguyen, Canh An Tien Pham, Van Hien Nguyen, Thien Phuc Tran, Tan Tien Nguyen (2018). Modular Design of Gymnotiform Undulating Fin. The International Conference on Advanced Engineering Theory and Applications. Springer, Charm (pp. 924-931).
- Van Hien Nguyen, Canh An Tien Pham, Van Dong Nguyen, Dae Hwan Kim, Tan Tien Nguyen (2018). A Study on Force Generated by Gymnotiform Undulating Fin. The 15th International Conference on Ubiquitous Robots (UR). IEEE. (pp. 241-246).
Patents
- Method and Apparatus for Continuous Plant Health Monitoring Using a Battery-free System withBiocompatible Implanted Sensors. (2022, accepted)
- Method and Apparatus for Continuous 3D Facial Reconstruction Through Lightweight Single-ear. (2021)